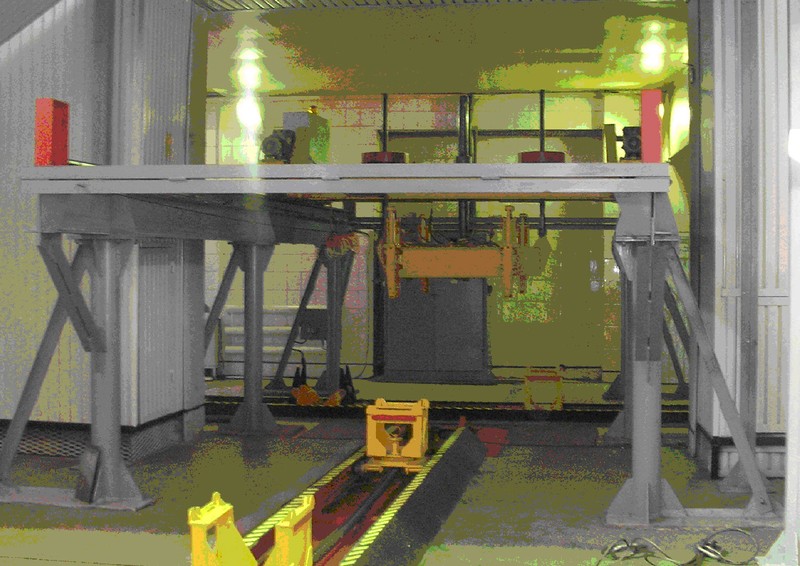
Робот фронтальной подачи каркаса тележеки на последующий комплекс РФП
Робот фронтальной подачи каркаса тележки предназначен для снятия рам тележек модели 18-100 (ЦНИИ-Х3) с колёсных пар и установки на транспортные каретки конвейера КПТ АК ПМВТ для выполнение дальнейших технологических операций по ремонту тележки.
Технические характеристики
-
Грузоподъёмность перегружателя, т 2
-
Скорость передвижения перегружателя, м/мин 0…9
-
Скорость подъёма траверсы, м/мин 2,5
-
Время подъёма траверсы, с 26
-
Привод перемещения перегружателя электромеханический
-
Количество приводов, шт. 1
-
Электродвигатель АИР90L4
-
Мощность, кВт 2,2
-
Частота вращения вала электродвигателя, мин-1 1425
-
Габаритные размеры перегружателя, мм
- длина 2666
- ширина 3992
- высота 2185
-
Колея перегружателя, мм 3600
-
База перегружателя, мм 1984
-
Масса перегружателя, кг 2517
-
Напряжение питающей электрической сети, В 380
-
Частота переменного тока, Гц 50
-
Эстакада робота фронтального, габаритные размеры, мм
- длина определяет заказчик
- ширина 5500
- высота 2610
-
Высота от пола до головки рельса (поверхности катания колес), мм 2294
-
Масса эстакады, кг определяет длина эстакады;
-
Высота робота с установленным перегружателем на эстакаду, мм 3724 max
-
Масса робота фронтального, кг 6440
Пример работы установки РФП-01
Исходное положение установки: перегружатель находится на позиции снятия тележки с колесных пар, грузоподъёмная траверса – в верхнем положении, захваты – в разжатом состоянии (штоки пневмоцилиндров – выдвинуты).
Порядок работы установки:
-
вагонная тележка – на позиции снятия с колёсных пар;
-
опускание грузозахватной траверсы перегружателя;
-
захват рамы тележки за боковые рамы;
-
подъём рамы тележки;
-
транспортирование рамы тележки на позицию загрузки ремонтного конвейера;
-
установка рамы тележки на транспортную каретку ремонтного конвейера;
-
разжим захватов;
-
подъём грузозахватной траверсы;
-
возвращение на исходную позицию.